A través de la experimentación y la simulación, los científicos son capaces de obtener una comprensión de los mecanismos biológicos subyacentes involucrados en los organismos vivos. Estos mecanismos, tanto de comportamiento y estructurales, sirven como fuente de inspiración en el desarrollo de redes neuronales basadas en arquitecturas robóticas. Algunos ejemplos de animales que sirven como fuente de inspiración para los sistemas robóticos son ranas y sapos, mantis religiosa y cucarachas. Para hacer frente a la complejidad que subyace en la construcción de este tipo de inspiración biológica, los sistemas robóticos basados en redes neuronales suelen distinguir entre dos niveles diferentes de modelos, esquemas de comportamiento y la estructura (RNA):
- Nivel conductual, los datos neuroethologicos de animales vivos se reunieron para generar sistemas de uno o varios animales para estudiar la relación entre un organismo vivo y su medio ambiente, haciendo hincapié en los aspectos tales como la cooperación y la competencia entre ellos. Ejemplos de modelos de comportamiento incluyen la Chantlitlaxia mantis religiosa ("búsqueda de un hábitat adecuado") y los modelos de la rana y el sapo (computatrix rana) de adquisición de la presa y de evitación de depredadores. Se describe el comportamiento en términos de esquemas perceptuales y motores descomponiendo y refinando de manera recursiva. Los esquemas se caracterizan principalmente como esquemas de percepción o motrices, descompuestos y refinados de manera recursiva. Jerarquías de esquema representan un modelo distribuido para el control de la acción-percepción. Los comportamientos, y sus correspondientes esquemas, se procesan a través de Simulación en lenguaje ASL.
- Nivel estructural, los datos neuroanatómicos y neuronfisiologicos se utilizan para generar modelos de redes neurales con la percepción y los movimientos correspondientes a los esquemas desarrollados a nivel conductual. Estos modelos tratan de explicar los mecanismos que subyacen a la integración sensoriomotora. Ejemplos de modelos de redes neuronales son el tectum y pretectum tálamo responsable de la discriminación entre presas y depredadores, los de adquisición de la presa y de evitación de depredadores con modelos neuronales y el de adquisición de presa sapo con el modelo de comportamiento de desvío que implica la adaptación y el aprendizaje. Las redes neuronales son procesadas a través de la Neural Simulation Language NSL.
Debido a la carga de procesamiento, la mayoría de los modelos están diseñados e implementados en una sola de las dos anteriores niveles de granularidad. Por ejemplo, en Arkin et al. se describe una mantis religiosa modelo presa-depredador simulada y se experimenta con un sistema robótico exclusivamente a nivel del comportamiento. Estos modelos son la base para nuevas áreas de aplicaciones robóticas, como la robótica ecológica. Por el otro, los modelos que realmente implican las redes neuronales son generalmente limitados en su alcance, mientras que modelos más complejos se simplifican en términos de su complejidad neuronal inherente. Sin embargo, a menos que podamos experimentar plenamente con los modelos más complejos, estaremos limitados en términos de su comprensión. Por ejemplo, vamos a considerar una extensión de la presa-depredador modelo de coordinación visomotora última, del sapo se describe en Weitzenfeld et al., con componentes de esquema y nivel neuronal se muestran en la Figura 2.
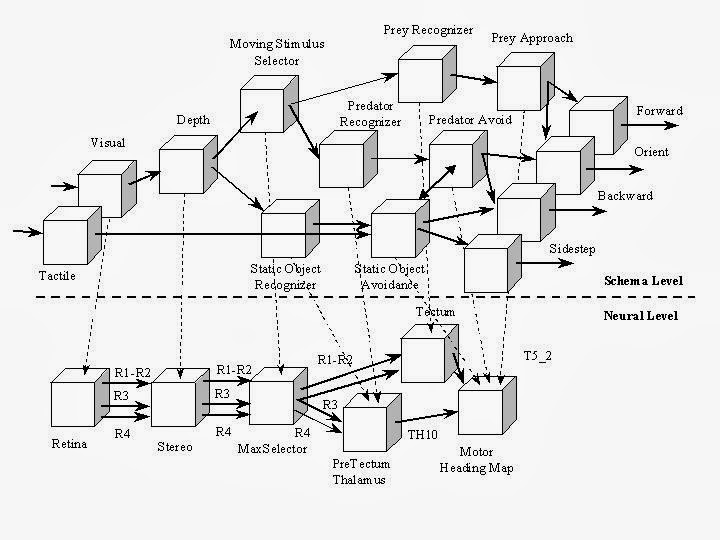 |
| Figura 2. Presa-Predador Rana y Sapo Modelo |
Traducido al español de www.ics.uci.edu